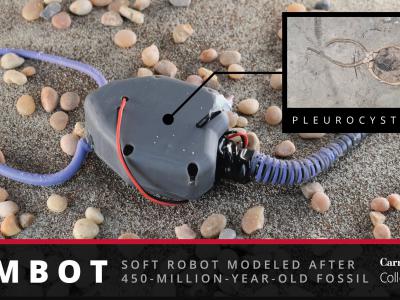
建筑机器人使用局部线索而非蓝图
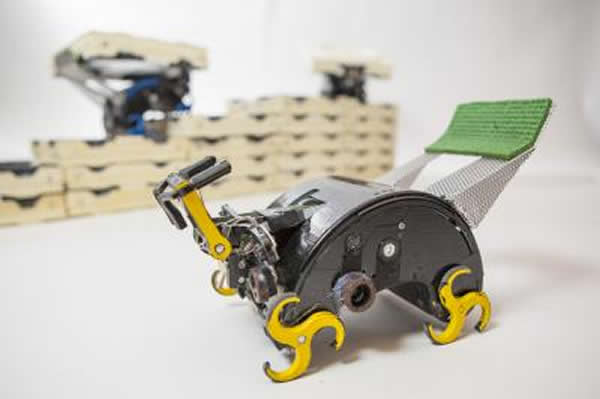
仿生攀爬机器人
(神秘的地球)据EurekAlert!:试想在不给任何蓝图的情况下告诉机器人为你建造一座有5间卧室的房子。
现在,科学家们在2月14日出版的《科学》杂志上报告说,他们制造了能够这样做――即在没有总体计划的情况下进行建造工作――的小型机器人,而白蚁则是他们灵感的来源。
本研究的主要作者Justin Werfel是马萨诸塞州坎布里奇 Wyss Institute for Biologically Inspired Engineering的研究人员,他说:“我们整个的研究课题都受到了白蚁的启发。当我们了解到这些小昆虫能够建造不可思议的东西时,我们说:这太好了。但是,我们要如何制造这些机器人并给其编制程序,从而让其以类似的方式工作并建造出人类想要的东西呢?”
人需要有一个高级的蓝图来建造某些复杂的东西,与人类不同,白蚁无需一个详细的方案就能建造比它们体型大数百倍的复杂土墩。相反,它们会从相互间以及从其环境中获得提示,从而知道它们应把下一个土块放在哪里,并最终知道如何建造一个适合于它们环境的结构。
以这种方法来使用局部信息被称作共识主动性。Justin Werfel及其同事利用共识主动性来设计显示白蚁行为的演算法,并接着将这些演算法用在了他们的机器人身上。
他们的机器人只需要拥有觉察到附近有块砖或有一个机器人的能力就能决定自己下一步的行动。它们在配备了传感器后可沿着一个栅格移动,提起并放置砖块。如果他们觉察到其通道上有一块砖,它们就会携带其负荷移至下一个空位。
它们是在没有详细的规划或中央通讯的情况完成这些工作的;而为这些机器人所设的程序只是若个简单的规则。
Werfel解释说:“有两种类型的规则。一类是在这些机器人建造任何结构时都遵循的相同的规则,另一类是与该特殊构造相对应的‘交通法’。这些[交通法]会告诉位于任何位置的机器人接下来有哪些位置可允许它们前往:在任何2个相邻的位置只能有朝着一个方向流动的交通,它能让机器人及建筑材料保持通过该构造的流动性。”
Werfel进一步解释了为什么机器人不会随便找个地方放置砖块。他说:“如果它们是在草率地进行建造工作,那么对它们来说在其被卡住的地方进行建造工作将是轻而易举的。安全性的检查要求一个机器人观察在其周围紧邻的各个地点,关注砖块已经被放置的位置以及其它应该放置砖块的地方,并确保满足位于局部的某些条件。”
尽管每个机器人仅“知道”简单的规则--如在何时放下一块砖,转身或向更高处攀登一步 -- 但综合来看,这些机器人展现了智能的行为,完成了用户定义的结构。
关键的是,它是由独特的用户定义的结构来决定机器人需要遵循的规则。换言之,是简单的规则指导着设计的过程,而不是受到人类建设项目所需的高层次的计划和规划所指导的。
像这样的独立且具有分散性控制的机器人有众多的优点。Werfel解释说:“个别的机器人可能会出毛病,但其余的机器人可继续运行。整个系统不会因为有一处关键环节出现了故障而瘫痪。”
这样的系统也具可缩放性。“如果要从事更大规模的工作,人们只需要增加更多的机器人(甚至在工作进行中)而无需对它们的编程进行改动。”相反,具有中央控制器的机器人系统会产生瓶颈,就其在有新的机器人进场时能够进行多少的协调而言,它会有局限性。
Werfel说:“对像这一机器人研制组来说,一个长远的愿景是构建为人类所用的实体大小规模的建筑,也许它尤其能在人类难以工作或工作时有危险的的环境中(如在地震后建造庇护场所或在水下或在其它星球上建造栖息场所)被派上用场。尽管这可能还有很长的路要走,但较短时间内能实现的可能是像用沙袋来修建防洪堤这样的工作。”