科学家考虑采用微型机器人来考察火星地下洞穴中存在生命的可能性
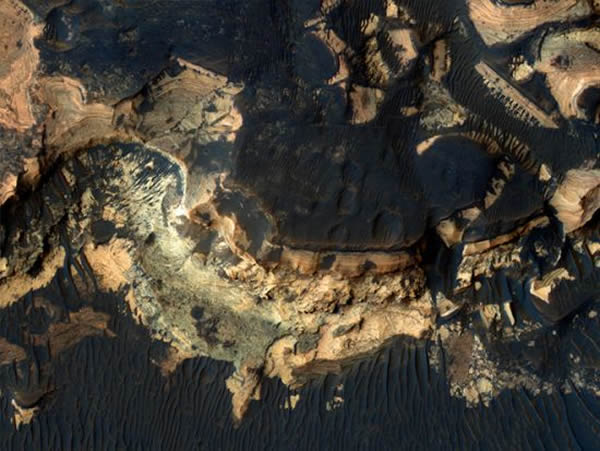
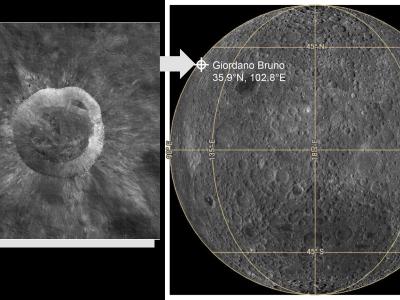
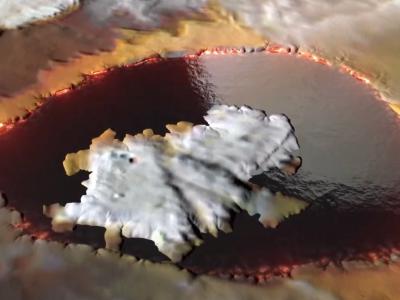
今年下半年,最新一代火星车“好奇”即将发射升空,这张图就是它的数个候选着陆点之一:霍尔丹陨石坑,由火星勘测轨道器(MRO)搭载的高分辨成像科学设备(HiRISE)拍摄。
科学家们正在考虑采用微型机器人来考察火星地下洞穴中存在生命的可能性。
火星大气中被检测出甲烷成分,但是其来源不明。一般认为甲烷成分要么来自地质活动,要么就是生活于火星地表以下的生命体产生。英国南安普顿大学的工程师阿隆•吉斯蒂(Áron Kisdi)说:“那里正发生有趣的事情,我们要做的就是去搞清楚究竟是什么事情。”
在3月3日出版的《宇航学报》(Acta Astronautica)上发表的一篇论文中,吉斯蒂提出,利用微型机器人对这些地下洞穴进行搜索是最佳选择,因为这样可以在最短的时间内进行最大范围的排查。
在2007年,美国宇航局的火星奥德赛探测器在火星表面发现了7个大型洞穴,非常大,也非常深,火星车可能很难进行考察。但火星奥德赛探测器的分辨能力有限,无法找到更小的洞穴系统。而一旦找到这样小一些的洞穴入口,就将成为火星车很好的考察目标。当然那样的话,这样的洞穴入口必须较浅,入口处也应该有平缓的斜坡可以让火星车行进。
吉斯蒂说:“我们已经派出多个机器人登上火星,有火星车也有轨道飞行器,但我们仍然仅仅考察了火星表面的很小一部分面积。”
而对于他的“机器人海战术”方案,吉斯蒂设想一种能滚能跳的机器人,暂且称为:“滚跳机器人”(Jollbot)。从地球向火星发射一个着陆器,一旦登陆火星,着陆器将释放出40~60个蜜蜂型微型滚跳机器人、它们可以自动导航移动,四散开去寻找洞穴并展开考察,就像在荒原上飞行的蜜蜂寻找安家的洞穴。
这种机器人对温度的差异非常敏感,由于洞穴内外的温度差,它变能感受到洞穴的存在。一旦找到一个洞穴,机器人会沿着最短路线返回登陆器,其遵循的路线被称为“蜜蜂路线”,这是一种生物学现象,蜜蜂外出后总是能够沿着最短的路径返回巢穴。随后,小机器人自动通过无线方式向着陆器上的主机传送自己的“发现”:洞穴的坐标位置,以及测量的温差数值等等。随后登陆器上的主机将汇总其他小机器人的探测数据并作出判断,是否对某一个洞穴进行详细考察,还是忽略它,继续进行搜寻工作。这样不用几个来回,主机就会累积到足够多的反馈信息进行分析,以便找出最佳的候选考察洞穴。
吉斯蒂解释说,这一方案最大的优点在于它不必过于依赖精密的编程设计,它们可以更加自由的移动,充分发挥它们的数量优势,在广泛的地面上展开考察,并且这样做的成本也更加低廉。更重要的是,进行这样的地毯式搜查之后可以锁定或排除大片区域,这样一来,在未来向火星发送价格高昂的精密探测设备时,就降低了它降落在科学价值不高区域的风险。他说:“并且,如果你弄丢了一个‘小爬虫‘,这没有什么,任务不会因此终止。”
在3月7日发布的一份报告中,一个由美国国家研究理事会召集的委员会曾经要求美国宇航局给与“火星天体生物学发现-收集者” (Mars Astrobiology Explorer-Cacher, MAX-C) 的执行以最高优先地位。这一项目是全部一系列三个项目中的第一个,这个计划旨在实现从火星表面进行土壤样本的取样返回。但报告同时也要求只有能做到将该项目的资金预算限制在25亿美元以内时才可以继续执行,这就意味着从现在本已十分紧张的项目预算中还要想办法砍掉10亿美元的预算。这样的预算压力给了吉斯蒂的设想很好的机会。
“探索火星最大的困难在于如何给在火星表面工作的机器人提供能源,”大卫•贝缇(David Beaty)说。他是美国宇航局喷气推进实验室(JPL)火星项目科学主顾。他说:“火星的表面积和地球上的陆地面积相当。从一个洞穴抵达另一个洞穴,这中间可能要走上数百公里的路。”
但贝缇表示,宇航局迄今并未开展任何有关蜜蜂型机器人设想的研究工作。不过他也认为,如果能证实吉斯蒂的机器人是能长期工作,动力系统是可靠的,那么这个设想还是很有潜力的。根据吉斯蒂目前的设计,派出50个这样的微型机器人在5天内就能覆盖完300个平米的地面面积。如果派出更多的机器人,给它们更长的时间,那么还可以对更广阔的火星地表展开考察工作。
吉斯蒂说:“接下来我将开始进行硬件设计,我将坚持不懈的努力工作,等待美国宇航局的下一次项目招标。”每隔两年,美国宇航局会进行一次火星探测项目的公开招标,很多很有创意的项目设计会入选,得到资助并最终实现登上火星的梦想。
新浪科技(晨风)