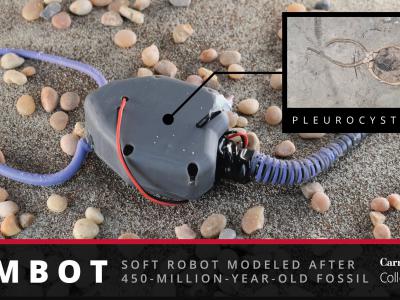
科研人员制造出一个柔性机器人
科研人员制造出了一个柔性机器人,能够爬行、改变步态,并且挤过障碍物。机械工程师通常使用踏面或轮子制造移动机器人,它们是用刚性金属零件运作的,诸如杆、关节、轴承和电动机。但是这类机器人通常重而昂贵,能执行的动作类型有限,而且在通过困难地形方面有困难。为了克服这些限制,George M. Whitesides及其同事用柔软而有弹性的聚合物制造了一个柔性机器人的原型,可以通过低压空气压缩驱动。这组作者受到了乌贼和海星等缺乏硬骨骼的动物的启发,他们使用了一种称为柔性平板印刷术的技术制造了一种四足机器人,能够爬行和起伏。
这个机器人的每一条腿都能够独立控制,从而通过一系列通过四肢的气压通道实现一系列的运动。此外,这组作者报告说,这个机器人可以穿过可能阻挡大多数刚性金属机器人的障碍路径:这种柔性机器人可以在不到1分钟的时间里通过执行一组有协调的运动从而挤过一个从地面抬高2厘米的玻璃碟子。这组作者说,由于柔性机器人可以让科学家把简单的设计与复杂的运动结合起来,而且比金属机器人更耐某些机械损害,它们可能有助于克服硬机器人在一些应用中的限制。
EurekAlert!