美国宇航局的新型“六足机器人”ATHLETE
在2013年于旧金山举行的游戏开发大会上,美国宇航局的代表团展出一款新型“六足机器人”,被命名为ATHLETE,它由NASA的喷推实验室复杂开发,可以通过远程控制实现行走,甚至的跳跃和舞蹈。来自喷推实验室的科学家维克・多罗和杰夫・诺里斯进行了演示性测试。ATHLETE机器人实际上是一型全地形地外天体探索者,其最大特点是配备了“六条腿”,即六个负重轮,科学家在腿部也设计了灵活的关节,可以进行大范围的移动。
NASA对未来行星登陆机器人项目的开发一直在进行之中,通过全新的界面控制以推动未来机器人探索的技术,从图中可以看出,ATHLETE机器人的六个负重轮拥有极大的灵活性,可在各种复杂的地形下前进,转向也非常方便,杰夫・诺里斯希望未来登陆其他星球的宇航员可以携带这款机器人,大型设备则由机器人来转移,甚至可以建立全息控制室,每个宇航员都配备一个机器人操作平台。
ATHLETE机器人尺寸大约在13英尺,可装卸大型货物,可爬上坡度为36度的斜面,科学家设计的六个全向负重轮可相互配合,保证稳定性。喷推实验室的科学家维克・多罗是本次任务的首席,他认为机器人导航和灵巧控制应该是重要的设计领域,此外,多罗还参与设计机器人操作的软件编写,完成15个空间无人探测器的相关研发工作。
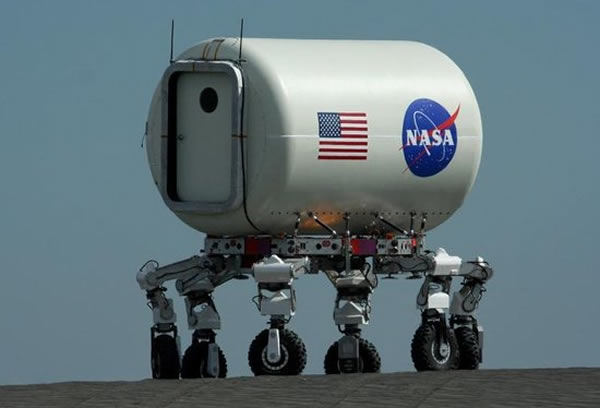
ATHLETE机器人拥有全地形行走能力,可装卸大型货物,宇航员可在地外天体上使用这款机器人,用它运输货物
腾讯科学讯(Everett/编译)