以蜥蜴为灵感的机器人探索火星表面
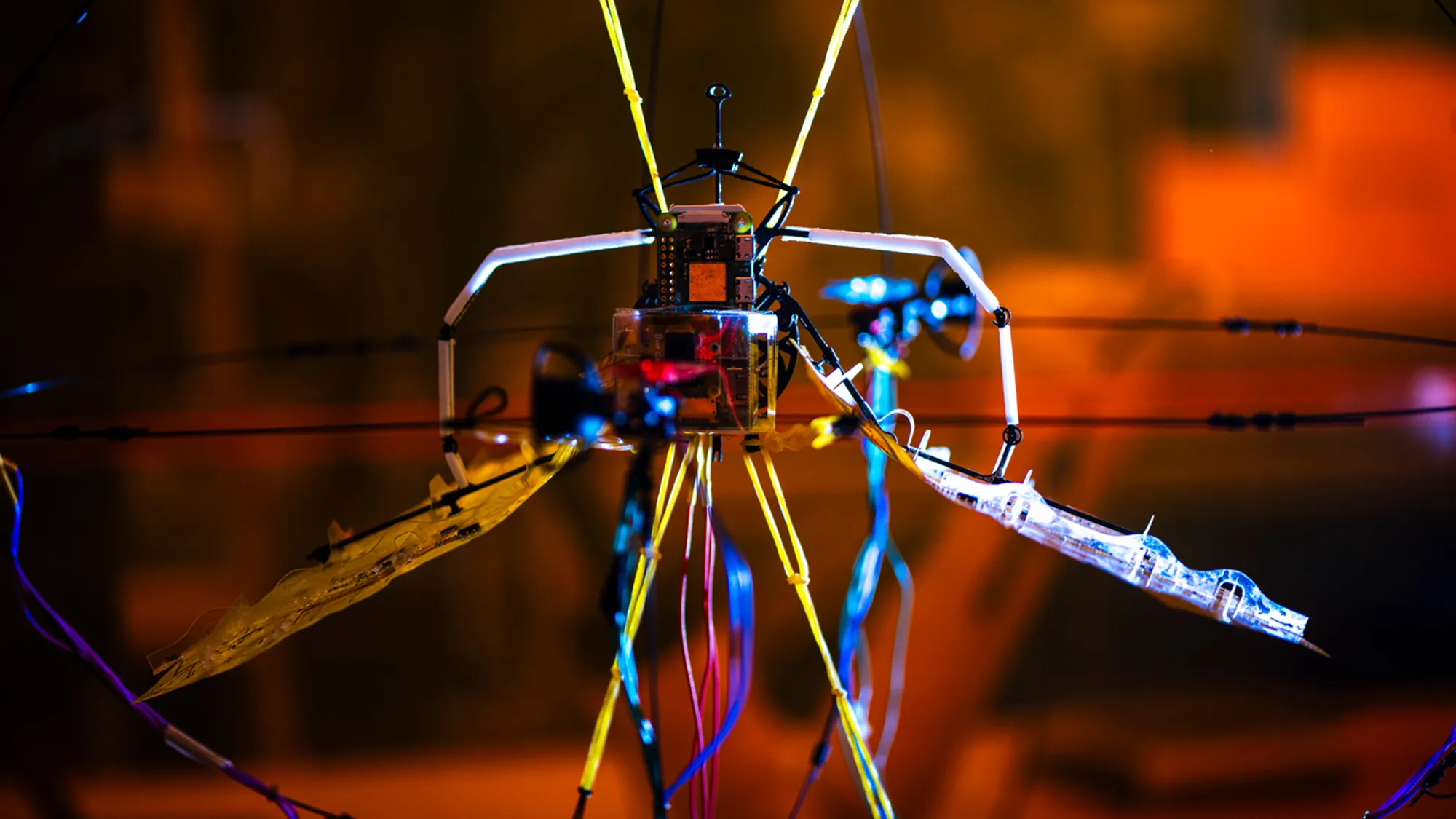
该团队以蜥蜴为灵感的四足机器人原型。Credit: Chen et al (MDPI, 2023).
(神秘的地球uux.cn)据by Ingrid Fadelli , Tech Xplore:技术进步为太空探索开辟了令人兴奋的可能性,这可能会导致对银河系天体的新发现。事实证明,机器人是探索其他行星的特别有前途的工具,特别是火星。火星是太阳系中的一颗类地行星,已知含有与地球上发现的元素类似的元素。
对火星及其表面的探索是一项迷人的探索,因为它可以揭示过去或现在的外星生命的迹象。除了可能揭示古代微生物生命的形式外,这些探索还可能导致发现地球以外的资源,为未来人类火星任务铺平道路。
南京航空航天大学的研究人员最近开发了一种以蜥蜴为灵感的新型四足机器人,该机器人可以帮助探索这颗红色星球的表面。他们的机器人在MDPI的《仿生》杂志上介绍,它有一个灵活的身体结构,可以复制沙漠蜥蜴的动作和运动方式。
陈光明、龙桥、周震文、卢茨・里希特和季爱红在论文中写道:“为了帮助雄心勃勃的火星探测任务,已经开发出了特定类型的行星车,用于在火星表面执行任务。”。“由于地表由各种大小的粒状土壤和岩石组成,当代漫游者在松软土壤上移动和翻越岩石时可能会遇到困难。为了克服这些困难,本研究开发了一种四足爬行机器人,其灵感来自沙漠蜥蜴的运动特性。”
陈和他的同事创造的仿生机器人由一个灵活的脊柱状结构和四条腿组成。为了复制蜥蜴典型的“爬行”动作,每条腿都有两个铰链和一个能引起摆动的装置。
连接脊柱结构和机器人腿的每个髋关节由两个伺服机构和一个四连杆机构组成,允许机器人在不失去平衡的情况下抬起。机器人的“脚”有四个灵活的“脚趾”,由两个铰链和一个爪子组成。
研究人员在他们的论文中解释说:“腿部结构采用了四连杆机构,确保了稳定的提升运动。”。“脚由一个活动的脚踝和一个圆形垫组成,垫上有四个灵活的脚趾,可以有效地抓住土壤和岩石。”
为了复制蜥蜴的运动,研究人员为机器人的每个部件创建了一系列运动学模型。然后,他们使用这些模型和数值计算来规划机器人的运动。
“为了确定机器人的运动,建立了与脚、腿和脊椎相关的运动学模型,”陈和他的同事在论文中写道。“此外,躯干脊柱和腿部之间的协调运动也得到了数值验证。”
研究人员最初在一系列模拟中评估了他们的机器人,以确定它是否能有效地复制蜥蜴的动作。他们的结果非常有希望,因为他们发现他们的机器人可以执行所需的动作和行走方式。
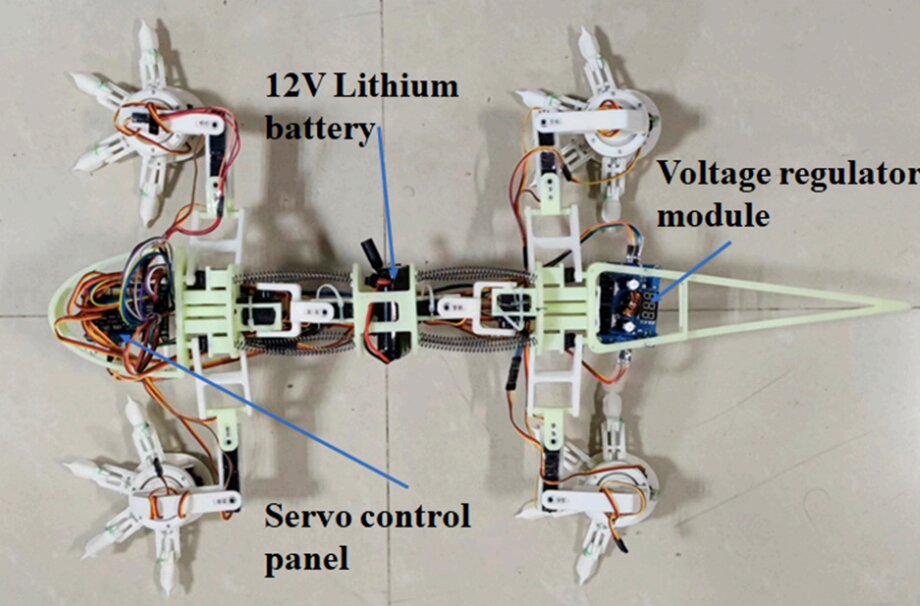
陈和他的同事们已经使用3D打印树脂材料、伺服控制面板、锂电池和其他电子元件制作了机器人的原型。然后,他们使用一个模拟试验台来评估他们的原型机器人在类似火星地形的岩石表面上的运动。
他们发现,该机器人可以在岩石环境中有效地移动,这突出了它未来在这颗红色星球上执行任务的潜力。然而,在它可以在实验室外部署和测试之前,该团队需要进一步开发它,例如添加一个保护性密封结构,以保护它免受土壤或空气中灰尘的影响,并使用更耐腐蚀的材料建造它的身体。
陈和他的同事现在正在研究机器学习模型,让他们的机器人适应不同的地形。此外,他们计划引入一种系统,为机器人提供持续的电源。