中加研究者合作提出多无人艇协同控制的新方法

中加研究者合作提出多无人艇协同控制的新方法
(神秘的地球uux.cn报道)据EurekAlert!:21世纪是海洋的世纪,海洋蕴藏着丰富的生物资源、油气资源、矿物资源,是人类生存和可持续发展的战略空间和资源要地。无人艇作为一种小型化、多用途、智能化并以遥控或自主方式航行的无人海洋运载平台,是一个国家海洋科技实力的重要体现。由于海洋环境日益复杂、作业任务日益多样、单体作业能力受限,多无人艇协同已成为无人艇应用的重要发展趋势。通过多无人艇协同实现集群控制,不仅可以显著地减轻操作人员的负担,还将使海洋作业变得更加持续、更具规模、更加智能。在军事领域,多无人艇协同已经展现了极为重要的应用价值,相关应用包括协同扫雷、协同护航、协同态势感知、“蜂群”跟踪与包围敌方舰船等多种作战任务。在民用领域,多无人艇协同能够极大地延伸海洋作业范围,显著地提高海洋作业效率,完成单一无人艇不能有效完成或无法完成的复杂任务。
协同路径跟踪是实现多无人艇协同控制的有效方法之一,研究人员在多无人艇协同路径跟踪控制问题上已取得很多研究结果。大多数研究结果都是针对多无人艇跟踪多参数化路径的情形,其控制思想是采用路径参数同步的方法得到横队编队队形。随后,研究人员提出一种路径参数包含控制方法,实现了多无人艇在单一曲线上的协同路径跟踪,得到单列编队队形。然而,这些研究结果都是针对开曲线上的编队控制问题。在很多实际应用场合中,海洋学家更倾向于闭曲线跟踪,因为闭曲线上的海洋信息采集更有利于数据分析且不受复杂海流的影响。值得一提的是,现有文献鲜有关注多无人艇闭曲线上的协同路径跟踪控制。
大连海事大学博士生刘陆、王丹教授、彭周华副教授、与加拿大多伦多大学Hugh H.T. LIU教授在Science China Information Sciences上合作发表了题为“Saturated Coordinated Control of Multiple Underactuated Unmanned Surface Vehicles Over a Closed Curve”的论文,研究了多无人艇闭曲线上的协同路径跟踪控制问题。
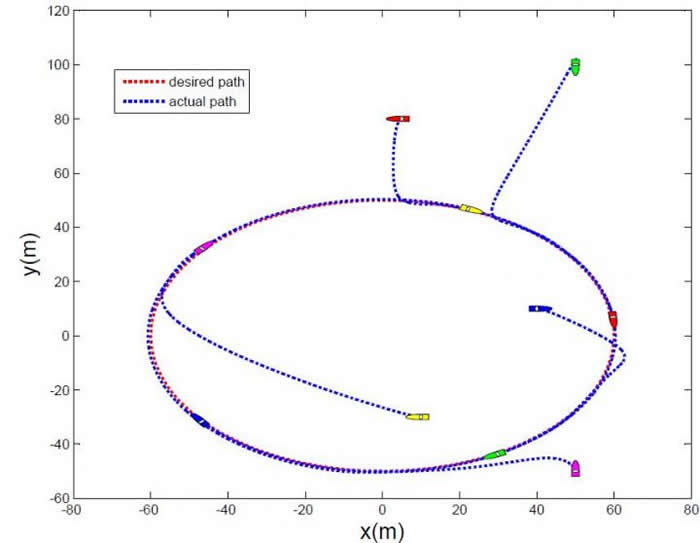
该论文针对多无人艇闭曲线上的协同路径跟踪问题,考虑每艘无人艇受到未知侧滑、不确定动力学模型、输入受限问题的影响,提出一种输入有界的协同路径跟踪控制方法,使得多无人艇在闭曲线上实现均匀分散的队形。协同控制器的设计结合了路径参数循环跟踪方法、视距导航律、降阶扩张状态观测器、神经网路与动态面控制方法。所提协同路径跟踪控制方法的主要特点如下:第一,提出一种路径参数循环跟踪方法,能够使得多人艇均匀地分散在闭曲线上,并实现对称的编队队形;第二,通讯量最小化,每艘无人艇只需接收它前面一艘无人艇的信息;第三,所提协同控制器的输入是有界的且界值已知。