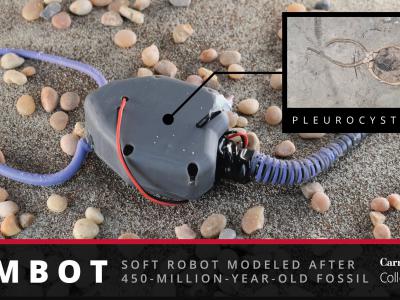
科学家开发出了一种机器人“通用抓握者”
科学家开发出了一种机器人“通用抓握者”,它使用一个填充了小颗粒的橡胶袋拾取日常物体。Eric Brown及其同事开发并测试了这种抓握者,它如同一个橡胶豆袋包裹着硬物体,然后当施加弱真空的时候,它会收缩、变硬。这种设计消除了用机器手指抓握物体必需的复杂的视觉反馈和力传感系统的要求,并且可以让这种装置在不同形状和脆弱程度的物体――诸如灯泡、蜡烛、海绵耳塞以及生鸡蛋――之间灵活地切换。这组作者报告说,这种抓握者的通用性来源于袋内的颗粒状物质的行为,当这些颗粒在真空中被压在一起的时候,它们可以在流动和塞紧状态之间迅速转换。这组作者说,尽管此前人们曾经提出过用可塑抓握者取代类似人类的机器人手指,科学家此前并不清楚柔软到刚性转换的机制,因此这个主意从未得到注意。这组作者提出,在遇到不熟悉的物体或复杂形状的时候,这种装置的性能可能超过机器手指,而且这种抓握者的密封结构可以让它在潮湿或挥发性的环境中有用。
EurekAlert!