意大利Walk-man机器人行走崎岖地势协助救援
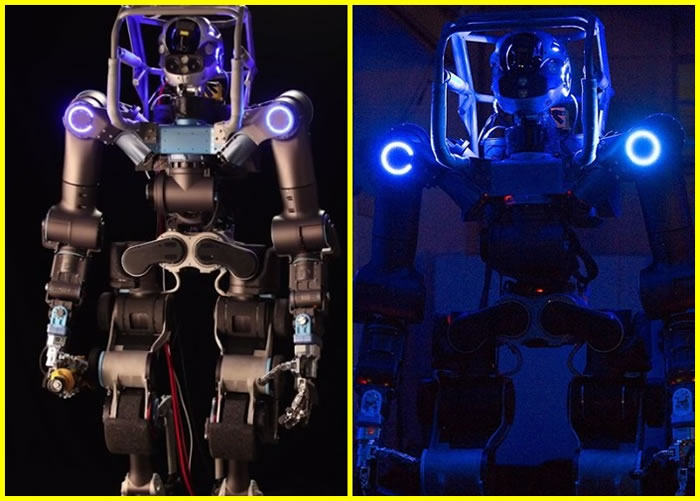
Walk-man机器人具备灵活弹性的四肢,可以在崎岖地势上行走。
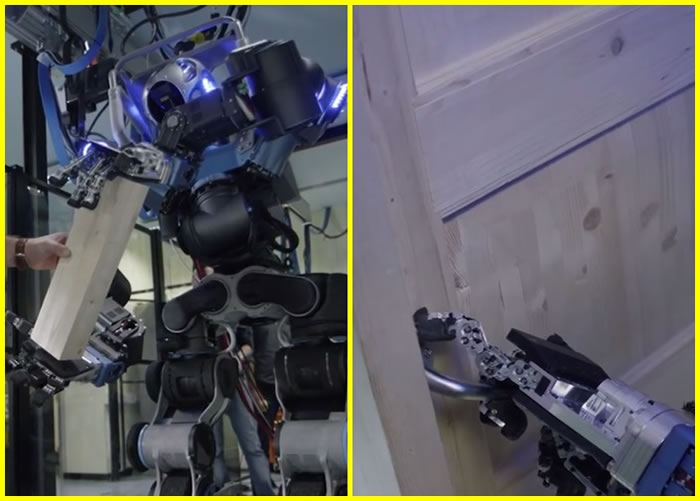
Walk-man机器人的灵活关节,可以做出提重及握物等动作。

在控制人员遥控下,Walk-man机器人甚至可以驾驶汽车。
(神秘的地球报道)当灾难发生后,往往由于灾场环境极恶劣或危险,救援人员未必能够即时进入灾场进行搜救。有见及此,意大利理工学院及比萨大学的研究人员开发出一款名为Walk-man、具备灵活四肢关节的机器人,让它们代替进入危险的灾场探索搜集数据,然后将数据传回,让救援人员安排适当的救援工作。
Walk-man高约1.8米,重约118公斤,双手展开阔达1.8米,其头部安装了立体视像系统和可旋转的镭射扫描器,让它更能清楚了解周遭的境况。Walk-man的弹性四肢,让它可以在崎岖不平的地势上行走。在遇到障碍时,其感应系统会进行运算,让它的四肢自行调节动作,保持平衡稳定。Walk-man具备灵活的关节,不但可以做出握物、提重等动作,在控制人员遥控下,甚至可以驾驶汽车。
研发团队表示,Walk-man的设计重点不在于其行进速度,因为机器人行得快,反而可能构成危险,故此他们的设计着重其稳定性,他们希望Walk-man日后可以在救灾工作上派上用场。