美国NASA推出“刺猬”漫游者概念 特别适合在行星和小行星上进行探测任务
研究者确认“刺猬”漫游者能做出“龙卷风”运动,即通过猛烈旋转脱离物体表面。

“刺猬”漫游者通过跳跃的方式移动,可以在几乎任何地形中翻滚。

设定好方向之后,“刺猬”漫游者或者利用两个长的突起进行远距离跳跃,或者翻滚到达近距离的目的地。
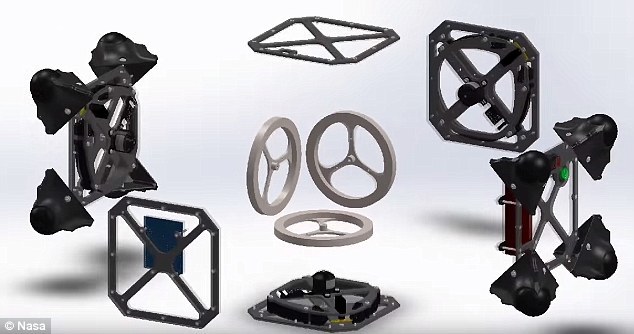
“刺猬”漫游者的基础结构是一个外部装有突起结构的立方体,可以利用内部调速轮的旋转和制动进行运动。
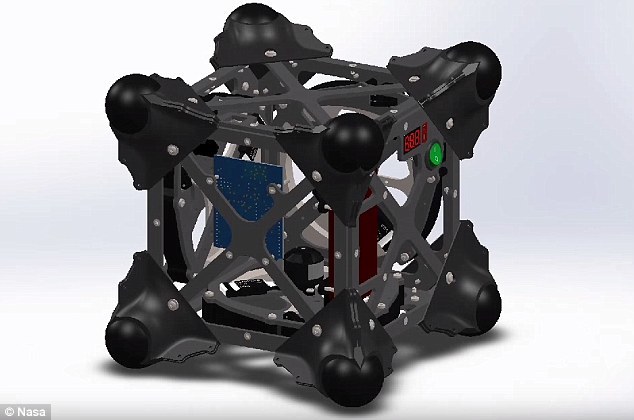
“刺猬”漫游者的外形是一个立方体,无论是以哪个面着陆,它都可以马上进行下一步操作。
(神秘的地球报道)据新浪科技(任天):当太空探测器在其他星球上进行探索的时候,我们很难想象它们会蹦蹦跳跳、闪转腾挪。不过,近日美国航空航天局(NASA)推出了“刺猬”漫游者的概念,据称能克服各种困难、崎岖的环境,特别适合在行星和小行星上进行探测任务。
“举例来说,传统的火星漫游者探测车是以轮子的旋转作为移动方式,它们无法进行翻转,”NASA称,“但是在一个小型天体,比如小行星或彗星上,低重力的环境条件和崎岖不平的表面使传统的漫游方式变得很危险。”
这一项目由NASA的喷气动力实验室、斯坦福大学和麻省理工学院的研究人员合作开发。 “‘刺猬’是一个完全不同的机器人,它能在星球表面上跳跃、翻滚,而不是依靠轮子转动,” 喷气动力实验室的团队负责人Issa Nesnas说,“它的形状是立方体,无论哪个面着陆都没问题。”
“刺猬”漫游者的基础结构是一个外部具有突起结构的立方体,可以利用内部调速轮的旋转和制动系统进行运动。这些突起能起到保护作用,并在跳跃和翻滚的时候充当“脚”的角色。此外,突起的内部还可以安装热探测器等设备,从而在“刺猬”翻滚的时候测量星球表面的温度。
在抛物线飞行测试实验中,“刺猬”漫游者还展现了多种运动的方式,这对于在低重力小型天体上的探测十分有利。研究者还测试不同表面上的运动效果,包括砂质、岩石、冰面等,这些表面有的粗糙,有的光滑,还有的柔软或易碎。
喷气动力实验室的首席工程师Robert Reid说:“我们第一次证明,‘刺猬’原型机可以在类似彗星的环境中表现出可控的跳跃和翻滚能力。”通常在设置了正确方向之后,“刺猬”能通过跳跃进行长距离移动,然后再通过翻滚靠近目标。在其中一次抛物线飞行的实验中,研究者确认“刺猬”漫游者还能做出一种类似“龙卷风”的运动,即可以通过猛烈旋转脱离物体表面。这在逃离沙地陷坑或其他恶劣环境时十分有用。
喷气动力实验室的“刺猬”漫游者原型机具有8个突起和3个调速轮,重量为5千克,研究人员预计在装上摄像机和光谱仪等设备后,它的重量会超过9千克。斯坦福大学研制的原型机稍微小一点,重量也轻一点,具有的突起也较短。利用内部的调速轮和制动系统,这两种原型机都可以进行旋转和急停等动作。
目前,研究人员还在对“刺猬”漫游者的自动化性能进行研究,希望使其在没有地球指令的情况下,完成尽可能多的任务。