适用于城市环境的智能地下机器人BADGER
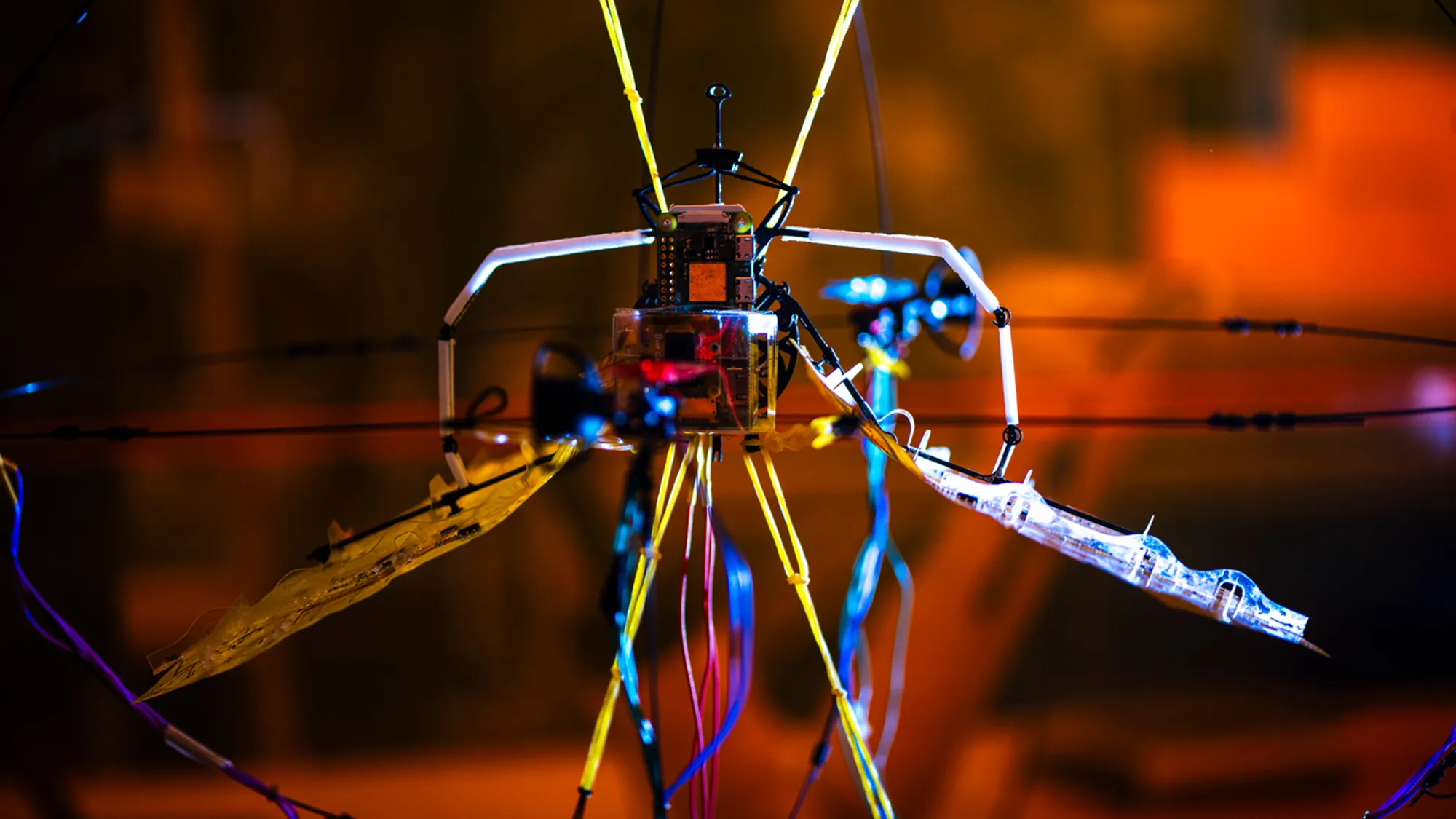
Badger, 是一台由一个钻头,两个固定模块以及两个推进和操纵模块组成的三米长的钻孔机器人。
(神秘的地球uux.cn报道)据EurekAlert!:开发适用于城市环境的智能地下机器人,该机器人系统主要由两部分组成:一个拥有可扫描地形地质雷达的地面连接器,用来感知地下的障碍物;以及一个自动地下机器人来进行钻探工作。“一旦使用安装了这个项目开发软件的地面连接器扫描地下地形,系统便会制定出一套工作计划,并确定需要进行工作的入口点和出口点。接下来的任务是将机器人带到作业现场,从一个点到另一个点进行钻探。”BADGER项目技术负责人,卡三自动化工程机器人实验室研究员圣地亚哥・马丁内斯・德拉卡萨(Santiago Martínez de la Casa)解释说明。
在欧洲,预计每年大约会进行500,000项安装电线、管道和其他类型的小直径地下管道的城市建设工程。通常,这些工作的流程是挖掘沟槽,把管道铺进沟槽并随后填满。“该机器人的优势在于,可以通过钻孔完成相同的工作,而无需打开沟渠,从而避免了噪音、环境污染和扰民等情况。”研究员表示。
由欧盟研究、技术开发和创新框架计划(GA 731968)提供经费,来自德国、西班牙、希腊、意大利以及英国的科研人员参与的该项目已经通过了实验室阶段的研发。具体来说,科研团队在马德里自治区以及德国北部已进行了几次地下钻探测试。
该机器人系统原型吸引了欧洲和北美公司的注意,并且目前正继续在真实的城市环境中进行测试。研究人员预计在两三年之内可以真正投入城市使用。
“将这项创新技术应用于定位、地图和导航以及传感器和地质雷达,将使其适应不同的地形”。项目协调人,UC3M自动化工程教授,机器人实验室主任卡洛斯・巴拉格(Carlos Balaguer)解释并补充:“这些具有认知和控制功能的先进机器人技术可以应用在很多领域,提高欧洲在搜救(如山体滑坡...)、采矿、民用(如水管、天然气、光纤...)以及勘探技术和制图等方面的竞争力。
BADGER(机器人地下自动非挖掘操作、地图绘制和导航的英语简称)是由UC3M协调的一个欧洲研发与创新(I+D+i)项目。参与该项目的有来自希腊海拉斯研究与技术中心、英国苏格兰格拉斯哥大学工程学院、意大利IDS Georadar Srl公司、西班牙Robotnik Automation SLL公司、希腊Singular Logic S.A公司以及德国Tracto-Technik GMbH & Co. KG公司的技术团队和研究人员。