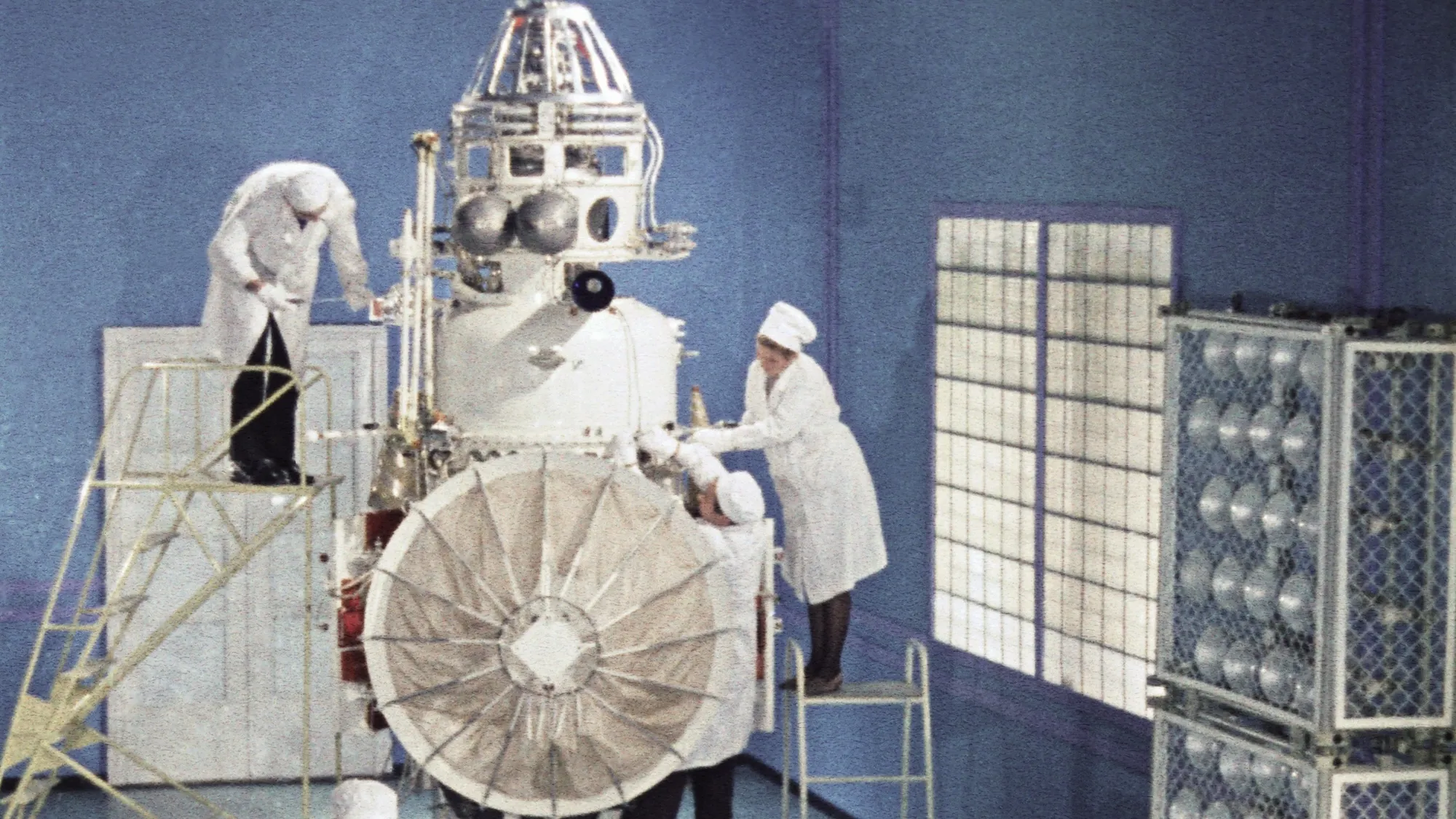
机器人舰队未来到达土星的卫星土卫六
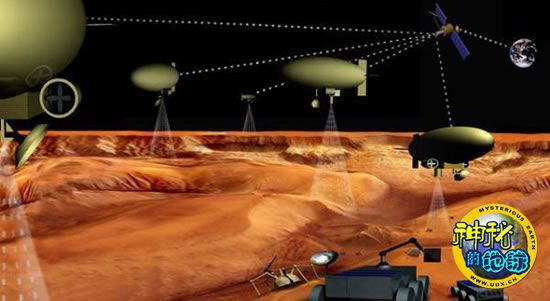
人造卫星、登陆器和小飞船在共同工作的艺术图
机器人舰队可能在未来到达土星的卫星土卫六。到那时,机器人舰队将不断穿梭在土卫六高山、沙丘和湖泊间,自主完成探索任务。
帕萨迪纳加州理工学院的访问学者沃尔夫冈・芬克(Wolfgang Fink)副教授指出,人类在行星探索技术方面正在发生巨大的转变,下一轮机器人探索行星的方式将和我们当前看到的大不一样。芬克最近已被特聘为图森市亚利桑那大学微电子学教授。芬克说:“我们未来探索行星的方式将和以前大不一样。传统做法是发送一个由地球指挥的宇宙飞船。未来我们将同时发送多个成本便宜的机器人,它们可以同时到达不同的地方,完成艰巨的探索任务。
据悉,加州理工学院、美国地质调查局以及美国亚利桑那大学的研究人员正在努力开发软件,并已经建立一个机器人试验平台,这个机器人实验平台模仿探索现场的地质学家和宇航员,“独立”开展工作。正在开发的这套软件可以让机器人自主思考,并自主确定观察的优先地点和目标。
而目前的外星探索方式是工程师发送飞行器或航天器来开展某项工作,然后等待它们完成。航天器对于变化的外界环境还是按部就班,没有一丁点灵活性。
芬克说:“在将来,机器人舰队将发挥出自身的主观能动性。”这些机器人将实时共享信息。未来可能将这种技术用于土卫六、火星或其它的行星探索上。现在,有关探索土卫六的建议方案是运用人造卫星、飞船以及登陆器。
在这个探索方案纲要中,环绕土卫六大的一个人造卫星将对土卫六进行全面观察,漂浮在土卫六上空的飞船可以鸟瞰其高山、湖泊和峡谷。在土卫六地面上,利用一个登陆器可以探索其每个角落。人造卫星可以和飞船直接“通话”,命令它飞到某个地点进行仔细观察。空中飞船将和土卫六地面的登陆器联络,并命令它们到达之前已经观察完毕的地点。
在新探索技术中,登陆器可以报告地面的具体情况,飞船或者人造卫星可以确认登陆器是否处在干涸的河床上。而现在的技术只能提供全貌,而不能够提供细节的信息,以便让登陆器可以停靠在干涸的河床中央。
芬克说:”我们正在朝着用机器人指挥机器人的目标前进。机器人舰队在将来可以自主指挥。这些机器人舰队在土卫六的空中和地面上,仿佛是我们身体不可或缺的一部分,不需要我们干预就可以对环境作出反应,并探索宇宙中未知的东西。”
据悉,关于这个外星探索新技术的文章已经发表在《生物医学的计算机方法与程序》以及《国际光学工程学会学报》上。
搜狐科学(尚力)