机器人受伤后自我修复
机器人受伤后自我修复
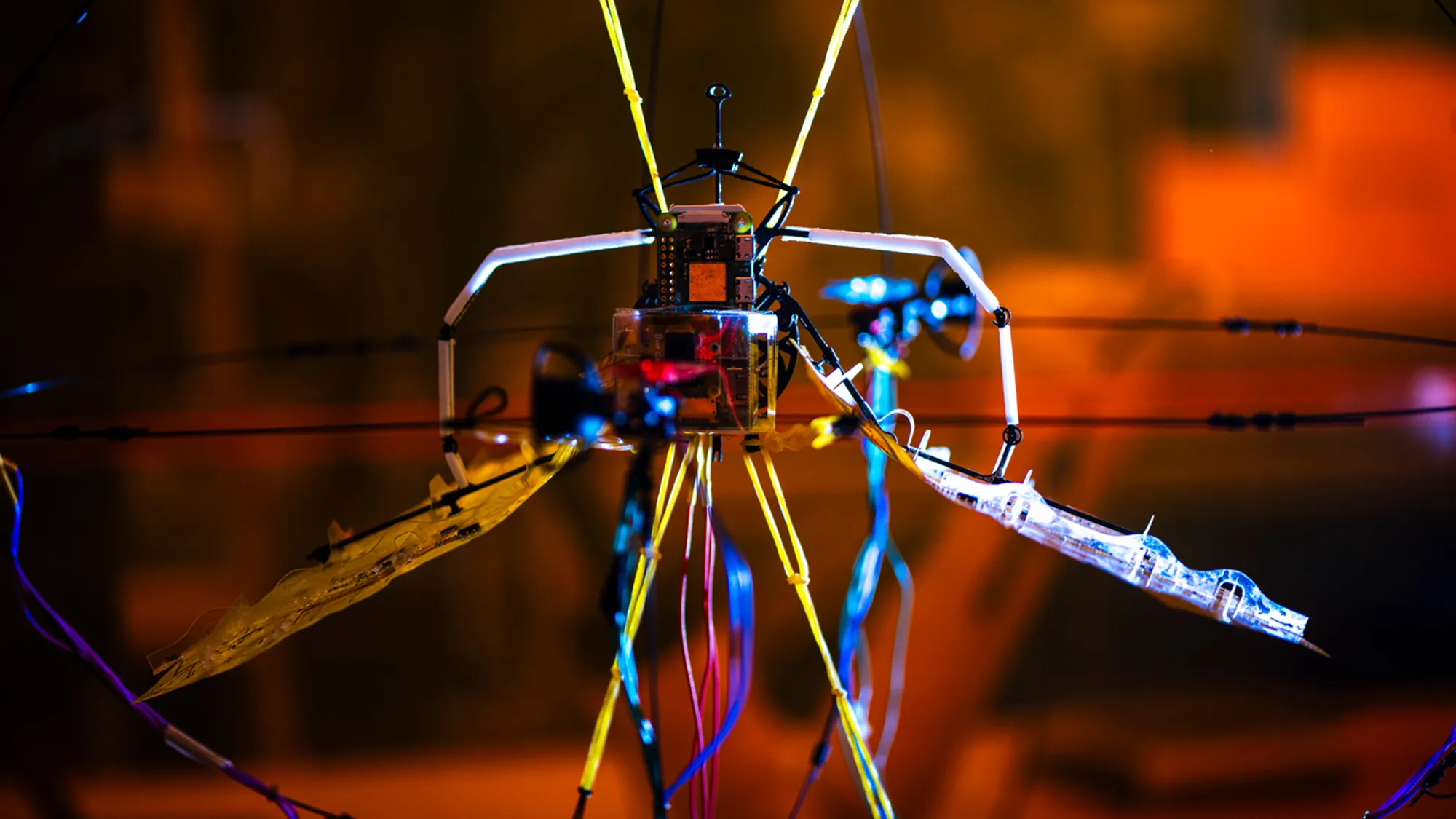
(神秘的地球报道)据EurekAlert!:机器人断肢以后,往往因为无法恢复其功能而陷入束手无策的境地。但在上述视频中,它们在完成一件以前从未完成过的事――选择最佳方案,实现伤后行走。
为完成这一壮举,六腿机器人们有赖于一张预先生成的图,这张图含有1万3千种不同的腿部运动组合方式及其对运动结果的预测。为得到这张图,机器人们先要“学习”走路,并且每种走路方法不尽相同:有些方法认为最好用上全部六条腿,有的则用三条腿,四条腿,或者混合式的行走方式。
一旦因为受伤而扰乱机器人的步法,那么这些机器人能够自动追溯该图,并测试其他已知的有效运动行为――比如只用四条腿而不是六条腿走路,然后利用反馈的测试结果来进一步修正对恢复方案的搜索结果。例如,一个右前腿受损的机器人,即使不“知道”自己到底哪条腿出了问题,但仍然能够迅速判定所有与这条伤腿有关的行动都不会成功。这项研究成果今天在线发表在《自然》杂志。
与先前的研究不同,其提出的伤后修复不需要程序员事先设想各种可能的恢复失利的情况,并针对每种情况写下指令。现在,机器人们可以自己独立地得出结论了。同时,这种新的算法还能帮助“健康的”机器人克服新障碍,如在与以往不同的地形上行走。它们可以尝试不同方案,分析实验结果,最终选择一个全新的最佳策略。
研究人员说,虽然这项技术成功的关键在于有足够多的备选方案可供选择,但这并不意味着其应用会受到限制――一段视频 中显示的机械手臂就是已经实现的一个应用实例。他们相信在未来,这个算法会在许多其它系统中得到应用,比如帮助行星探测器或深海探测器在受损后能继续工作更长的时间。