研究人员用3D打印技术及软硬组合材料设计出更有效的跳跃机器人

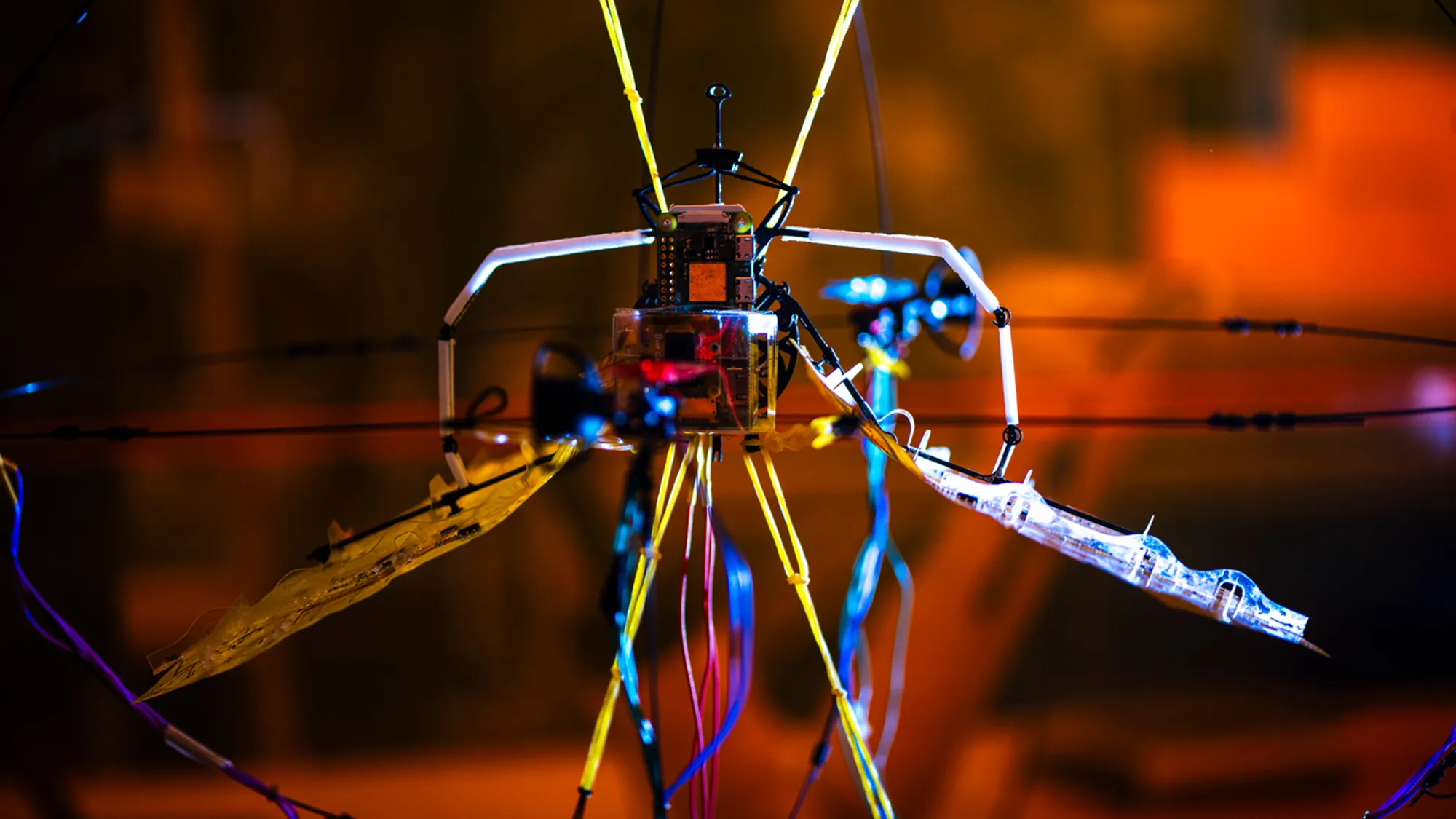
在户外环境中的机器人图片(图片:Wyss生物启发工程研究所及哈佛大学工程与应用科学学院)
(神秘的地球报道)据EurekAlert!:研究人员用三维(3D)打印技术及一种软硬组合的材料设计出了一种更有效的跳跃机器人。受到自然界中各种设计的启发(如蛇或昆虫幼体),软体机器人比传统的刚性机器人更安全、更具适应性并更具复原能力,但其铸造和发动则被证明颇具挑战性。
现在,Nicholas Bartlett和同事报告了一种设计并制造不受约束的、蛙样跳跃机器的技术,它比从前的机器人更耐用且更能被控制。研究人员用一种多材料3D打印机来铸造机器人体,它有9层(跨越3个数量级)不同材料--从高度柔韧的橡胶样材料至完全刚性的热塑性类材料。一个刚性的核心容纳有关键的组件,它们包括一个电池和一个空气压缩机,并将用于燃烧的丁烷和氧气结合在一起,而一个主要是软性的机器人体则能吸收冲撞力。
通过细调该机器人的软、硬组件间界面,Bartlett和他的团队能够设计出一种可承受更多着陆并能更精确控制跳跃方向的机器人。将来,这些软体机器人或能被挤入狭小的空间并从事对人来说过于危险的作业。